Coral Reef Mapping Drone
The Problem
- All life as we know it comes from the ocean, yet the oceans are under threat. Marine Protected Areas (MPAs) are one of the most effective and low-cost ways to protect our oceans while making them more productive and financially profitable. Currently only about 3% of our ocean has strongly protected waters while scientists agree that 30% are necessary for a sustainable ocean. We have a long way to go to create more MPA, monitor and enforce them. The brief was presented by former NOAA Administrator Jane Lubchenco below. - "There is broad acceptance of “green parks” on land, but demonstrating positive impacts that ultimately effect nearby communities with “blue parks” remains a challenge. - Coral reefs are the most vital ecosystem on this planet but are quickly deteriorating. In 2016 alone, 93% of the Australia Great Coral Reef Barrier bleached, 22% died. [1] Current survey methods include : - Divers provide high resolution but are too slow, expensive and dangerous. Result: covering few areas, infrequently. - Satellite and aerial drones provide low resolution do not permit to identify coral species. Result: data is incomplete, and can literally only the “big picture” but not a fine understanding.
Our Proposal
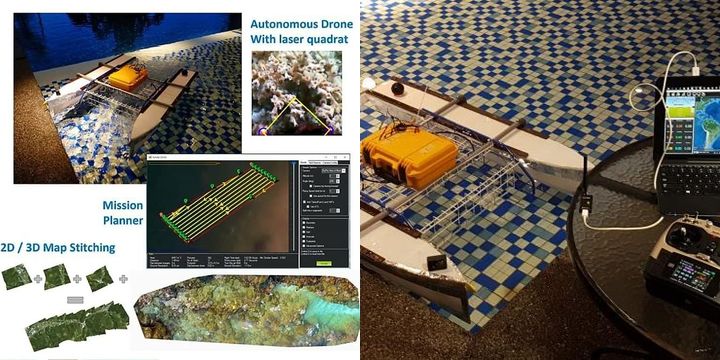
"Scoutbot Kuching" is a semi-autonomous boat that is targeted to monitor marine protected areas, or map shallow coral reefs. It has both remote control (RC) capacity as well as route planning using the Pixhawk microcontroller. Our inventions: #1 Diver -> Ocean Surface Drone (Adapted from flying drone) #2 Mechanical Quadrat -> Laser quadrat #3 Mapping -> Integrated workflow from imaging, map, to data Our goal is to make coral reef mapping - 10x faster - 10x more accurate - 10x cheaper than state of the art - Fast: taking pictures at regular interval assisted with laser quadrat - Accurate: GPS Flight Controller-based System - Low cost: based on affordable, reliable open source drone technologies - Requires low skill: Way Point Design and Trajectory Planning, deployable by local community
We Assume that...
1. Coral survey by humans is slow, expensive, dangerous, low accuracy and lack consistency.
2. Mapping using Aerial Drone will produce sub-standard image quality of underwater corals,
Goals: 10x faster Deploy quicker and cover larger area in a short time,Highly repeatable 10x more accurate, GPS positioning,Laser quadrat provide scaling and depth information 10x cheaper
3. Mechanical Quadrat: - Slow,Invasive and potentially damaging to coral - Expensive: because it is slow - Ineffective for high rugosity terrain - Low Accuracy and Consistency
4. Mapping Drone: - Fast: Automated photo trigerring - Accurate: GPS positioning - Low cost: affordable, reliable drone technology - Requires low skill: Way Point Design,deployable by local community
5. Laser Quadrat: - Fast: No need to reposition a quadrat - Accurate: Remotely measure while using well-known academic methods - Low cost: based on simple, well-understood technologies
6. - Accurate, Consistent, Repeatable - High Image Quality - Reach hostile sites - Cloud-based Data Storage - Richer Coral Health Information - Lower time & cost - Easy-Deploy and Operate
Constraints to Overcome
Current survey methods include : - Divers provide high resolution but are too slow, expensive and dangerous. Result: covering few areas, infrequently. - Satellite and aerial drones provide low resolution do not permit to identify coral species. Result: data is incomplete, and can literally only the “big picture” but not a fine understanding.
Current Work
Our goal is to make coral reef mapping - 10x faster - 10x more accurate - 10x cheaper than state of the art
Current Needs
Potential partnerships and areas for us to test the solution on Grants and investments to bring the solution ahead Software developers