Marine robots for IAS control
The Problem
Invasive species are a major threat to global conservation, being the second cause of biodiversity loss worldwide. Furthermore, invasive species also have important negative effects on society since they impact economic, social and public health resources (e.g. fisheries, water quality, tourism, etc.). Invasive algae, while they may appear less dangerous that predatory animals (like the lionfish), are, in fact of particular concern because they can profoundly modify marine ecosystems and cause significant damage and ecological and economic impacts. Halimeda incrassata is an invasive seaweed that has been detected in the waters of Mallorca, where it colonizes sandy bottoms, modifying the habitat for some important commercial species, as well as seagrass meadows, which are highly valued for their contributions as nursery habitats, providing clear waters and coastal protection. The Balearic Islands, where the economy is strongly based on tourism, needs solutions to this problem. Critical for the conservation of marine ecosystems is obtaining sound, quantitative and replicated data of the presence of invasive species that can allow early detection and eradication as well as monitoring through time and space (e.g. to monitor eradication attempts, perform predictive spatial modelling of expansion, etc.) so resources are placed to carry out the best strategies to prevent further spread, etc. This product could also be expanded to be applied to other target invasive species.
Our Proposal
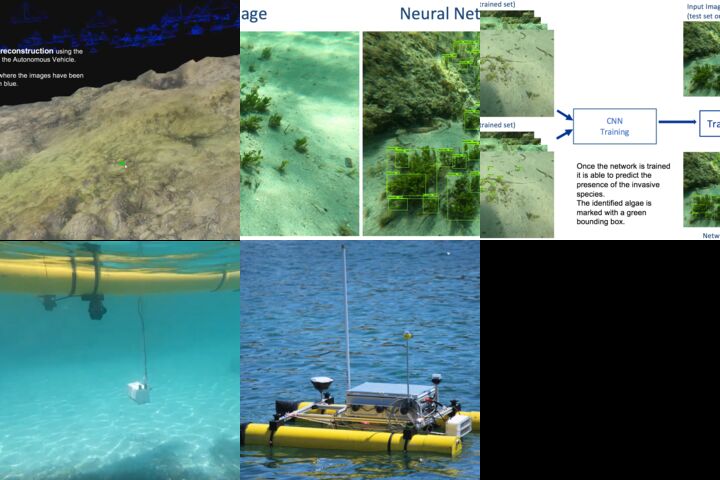
We present a low-cost flexible and modular Autonomous Surface Vehicle (ASV) for automatically monitoring the invasive algae Halimeda incrassata. To carried out this task, the area of interest will be surveyed with the ASV and a video sequence of images will be recorded together with their geolocalization. Then, these images will be processed and segmented online using convolutional neural networks and passed to a coverage map generation algorithm. The ASV has been designed with a modular structure which facilitates maintenance, transport and hardware modifications. All the electronics devices including the power supply are located in a watertight box fixed to the main frame. Several through hullconnectors isolated with epoxy provide watertight cablerouting to the external sensors and actuators. The software architecture implements 3 different types of navigation behaviours depending of the mission require-ments: follow a list of waypoints, track another Autonomous Underwater/Surface Vehicle or keepposition. To automatically perform a high-precision Halimeda incrassata algae segmentation in sea-floor images, a deep convolutional neural network will be used. To be able to do the segmentation online while the ASV is navigating, a pipeline based on ROS will be implemented. It will load a frozen inference graph of a trained model and will execute two threads; one for the image gathering and another for the image segmentation.
We Assume that...
Deep learning techniques will be able to detect and classify the invasive algae species
The images captured by the robot will have enough quality to be adequate for their analysis.
The robot's geolocation based on its sensors must be precise.
The images will be able to detect H. incrassata when this species is at its maximum development stage (late summer).
Constraints to Overcome
Traditionally, ecological studies aimed at monitoring species and their associated spatial and temporal changes have often relied on human visual observations. However, undertaking visual observations can be time-consuming, labor intensive and hence costly. Thus, the high costs associated with these types of studies can often restrict their spatial and temporal extent. The use of Autonomous Underwater and Surface Vehicles allows the systematic and massive collection of underwater images and data. The advent of automatic computer-aided image classification using deep learning techniques represents a milestone for observational ecological studies, image data can now be analyzed at a fraction of the time than when the analysis is performed by humans. Also, affordable design and repeatability allow covering larger more extense areas.
Current Work
Organize and carry out field sampling to test the vehicle Improve the autonomous surface vehicle mission planning. Decide which type of deep learning architecture suits better this application (object detection or semantic segmentation).